









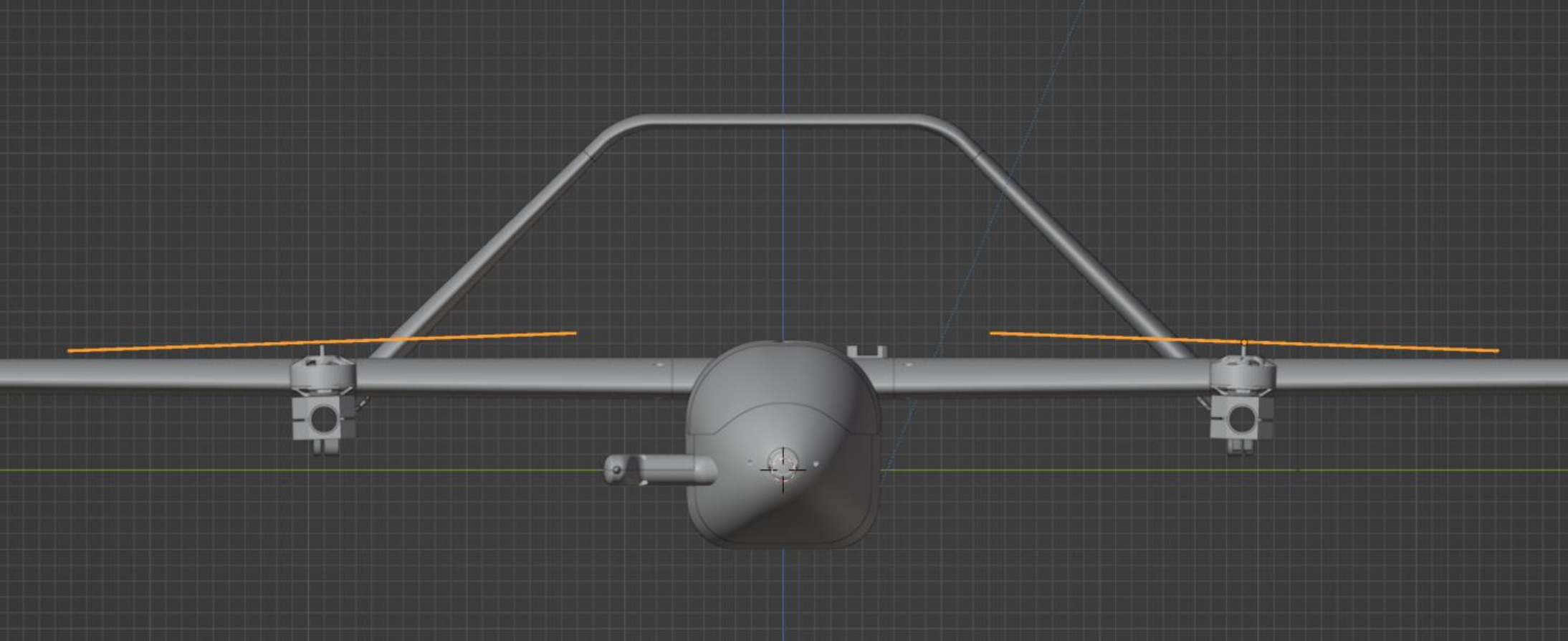
Prop arcs visualized: 12x6 CW/CCW for the lift motors, and 13x8 CCW for forward flight




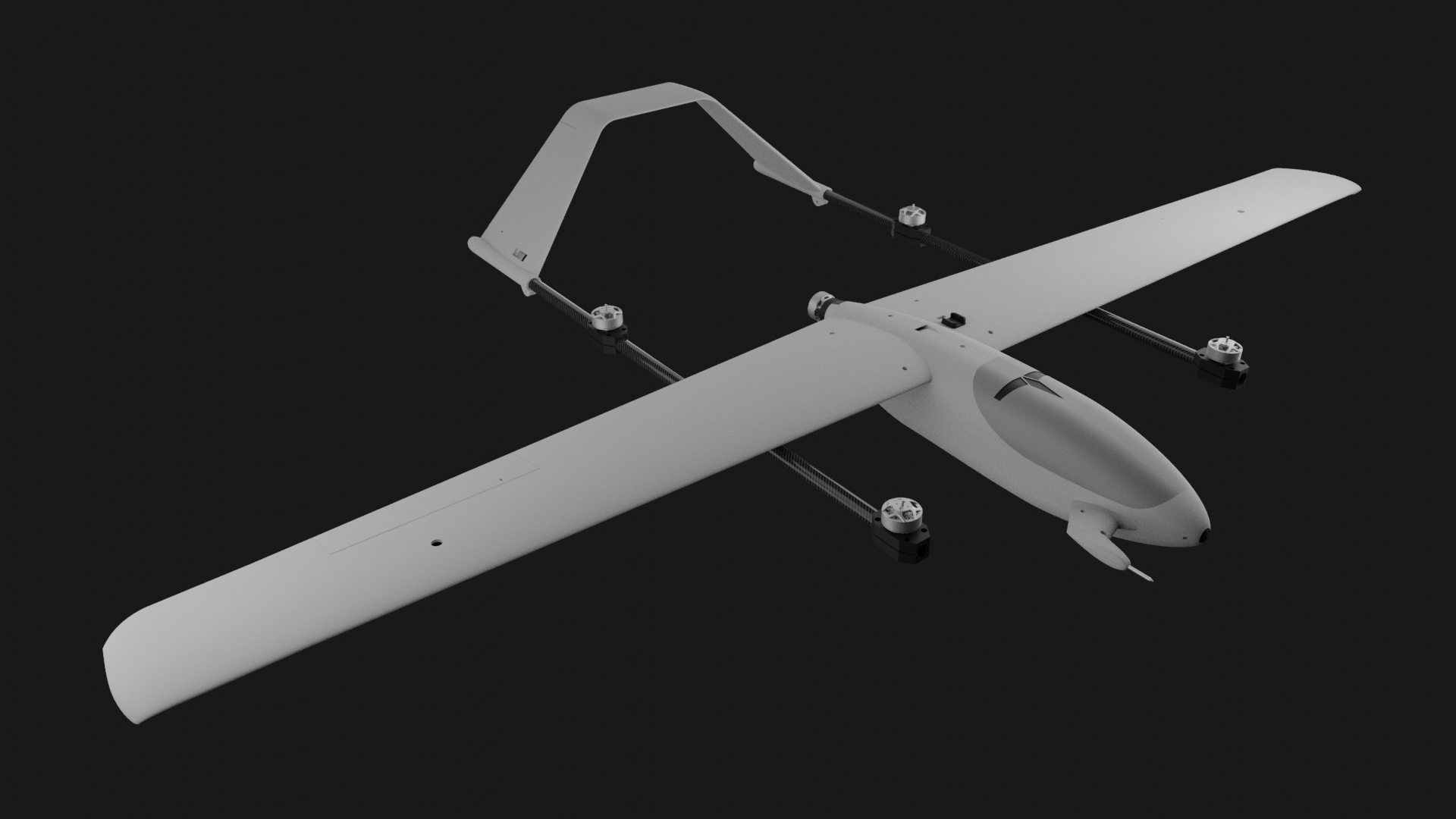
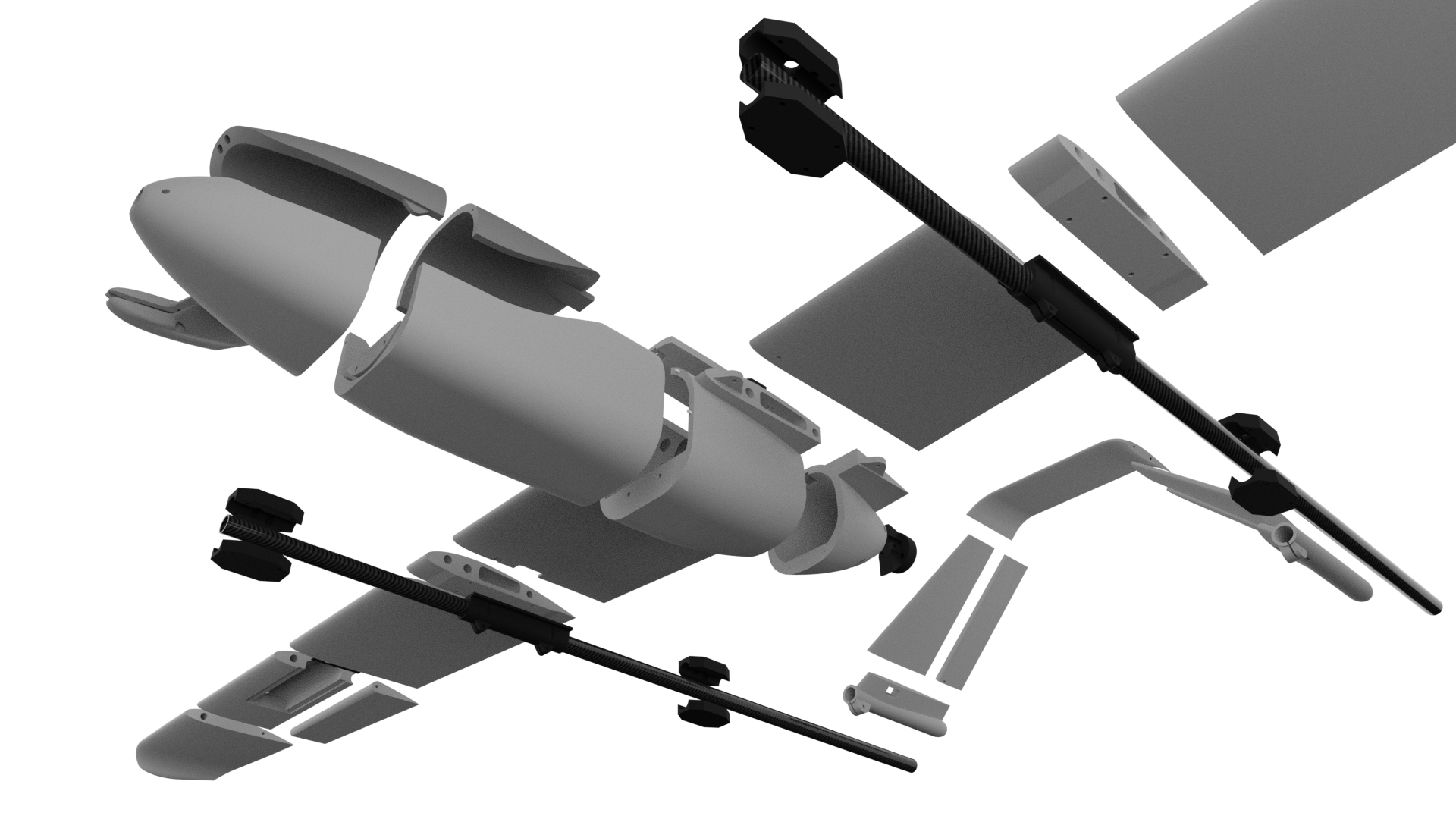
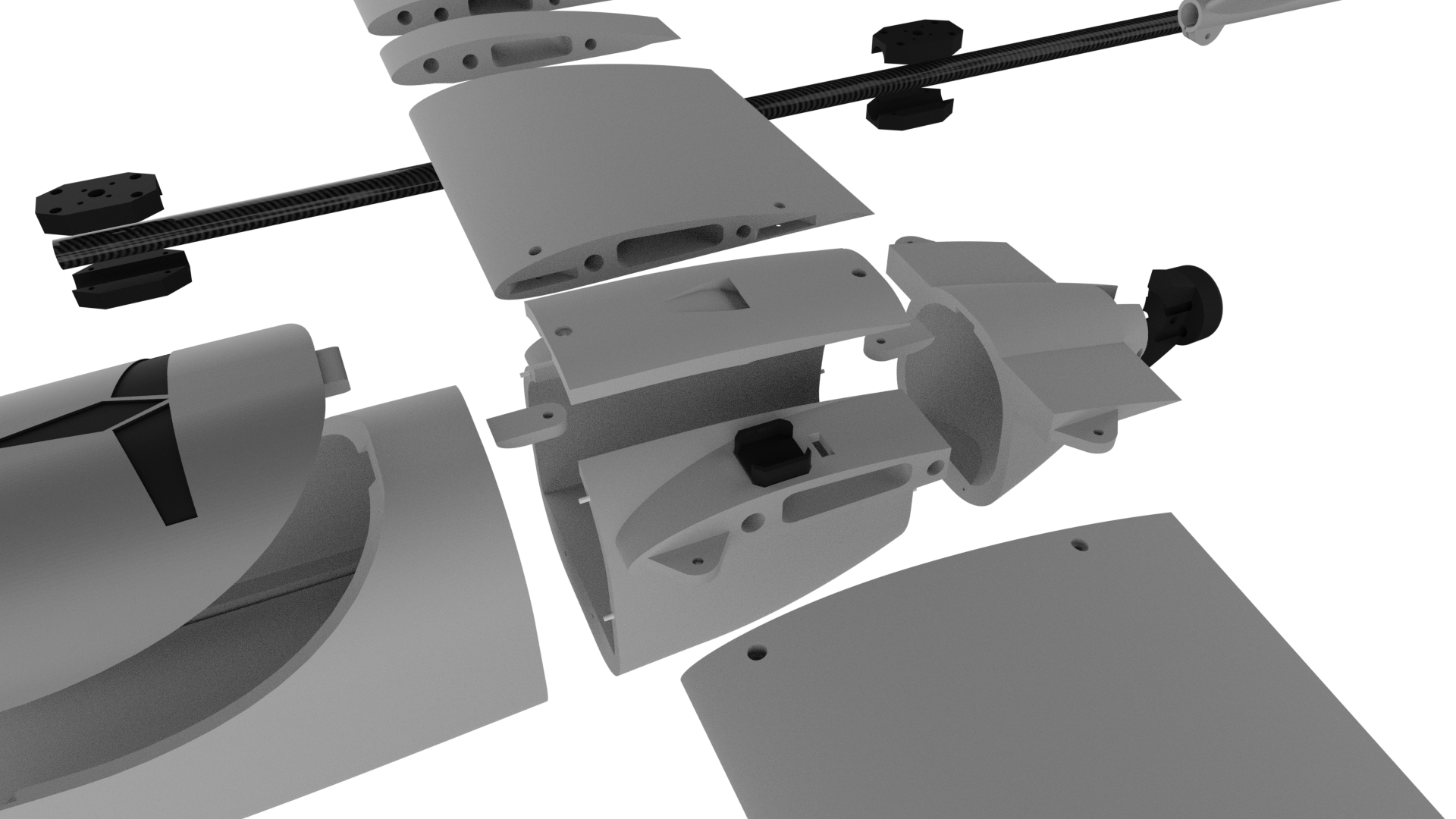
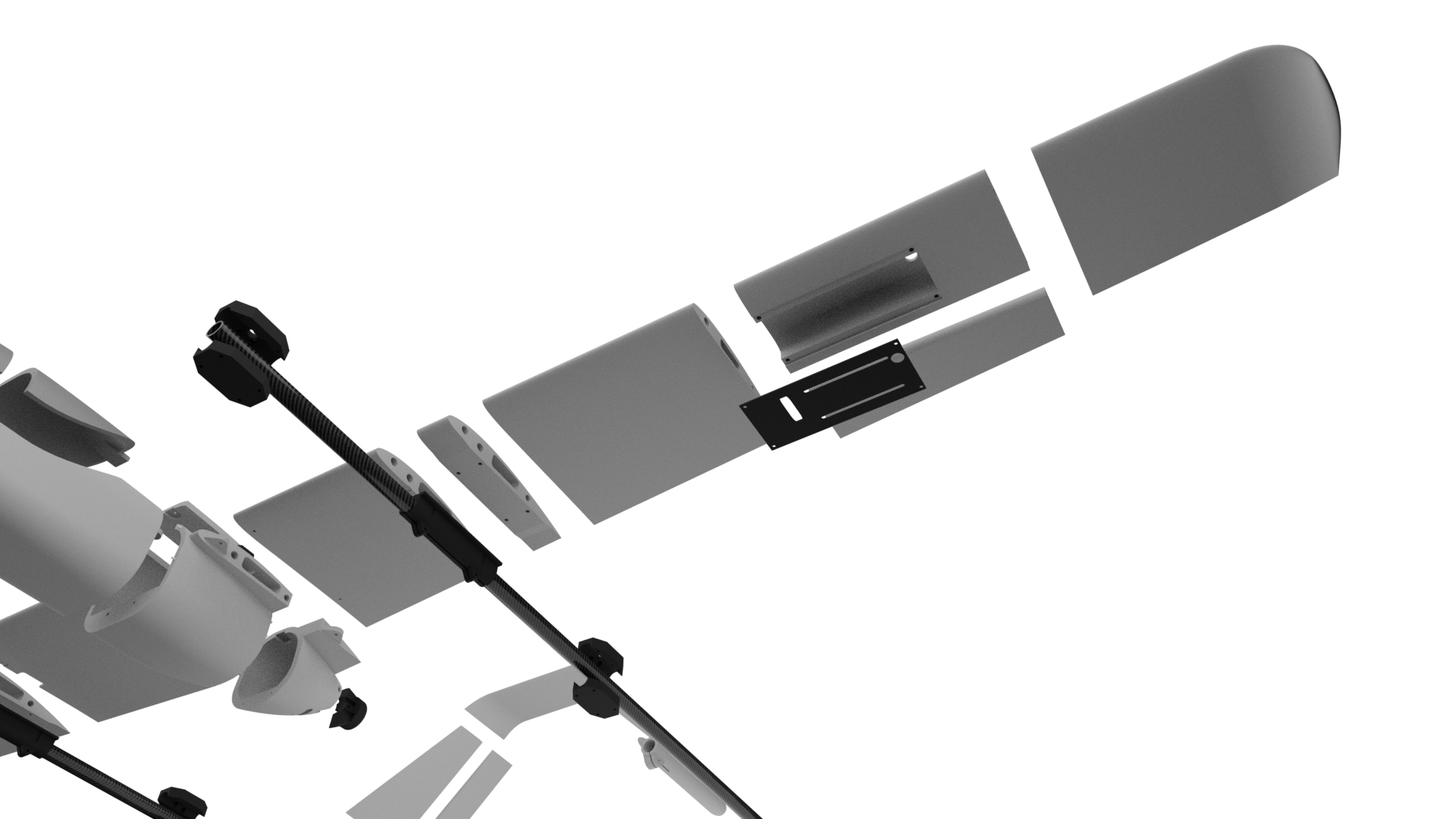
A detailed look at the mounting of the lift motors, pusher motor, and tail boom. All mounts are clamped to the booms, and the clamping mechanisms have been extensively tested for rigidity


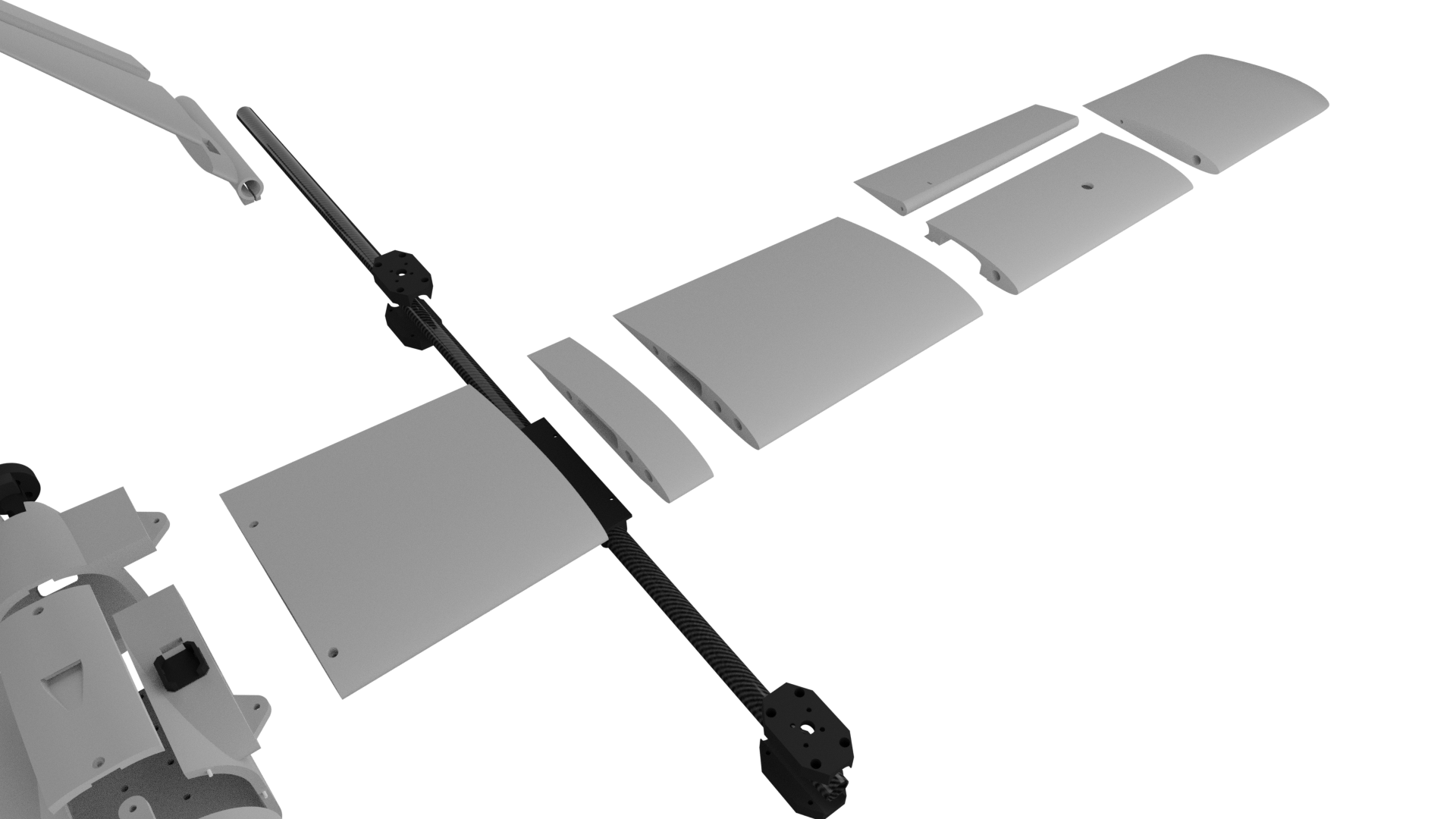
Carbon tubes and rods are spread throughout in order to attain the best structural rigidity possible - reducing harmonics, vibrations, and flex during hover transition and forward flight


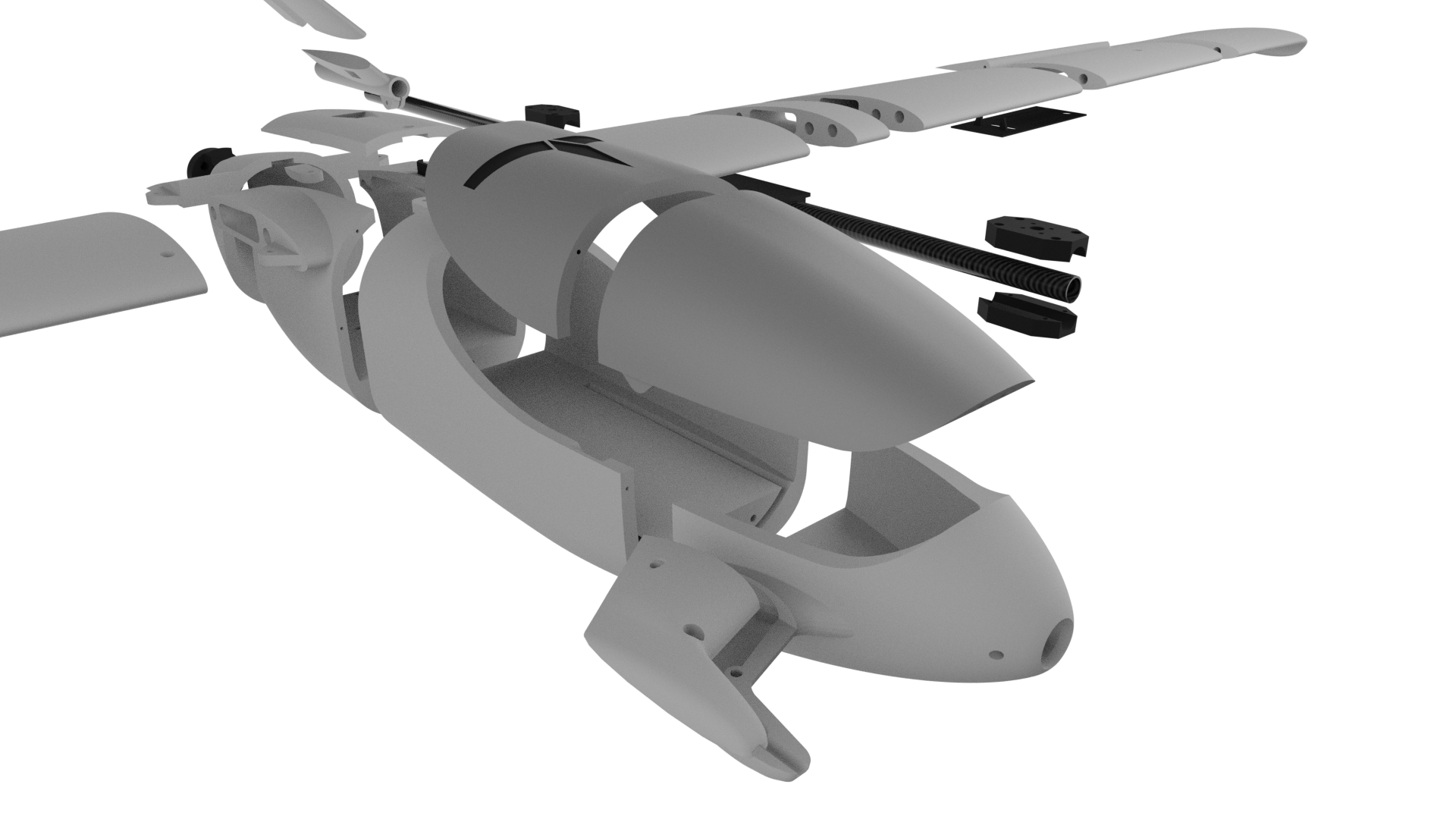
The internal cavity of the fuselage features ample space for large battery packs as well as hard mounting points on the floor for electronics and other components. The optional airspeed sensor mounting is simple, low drag, and lightweight. The bottom half of the housing must be glued to the fuselage, while the top half can be screwed on. The housing fits both the pitot tube as well as the sensor PCB, allowing for a non-permanent install with only wires exiting the housing and no tubes


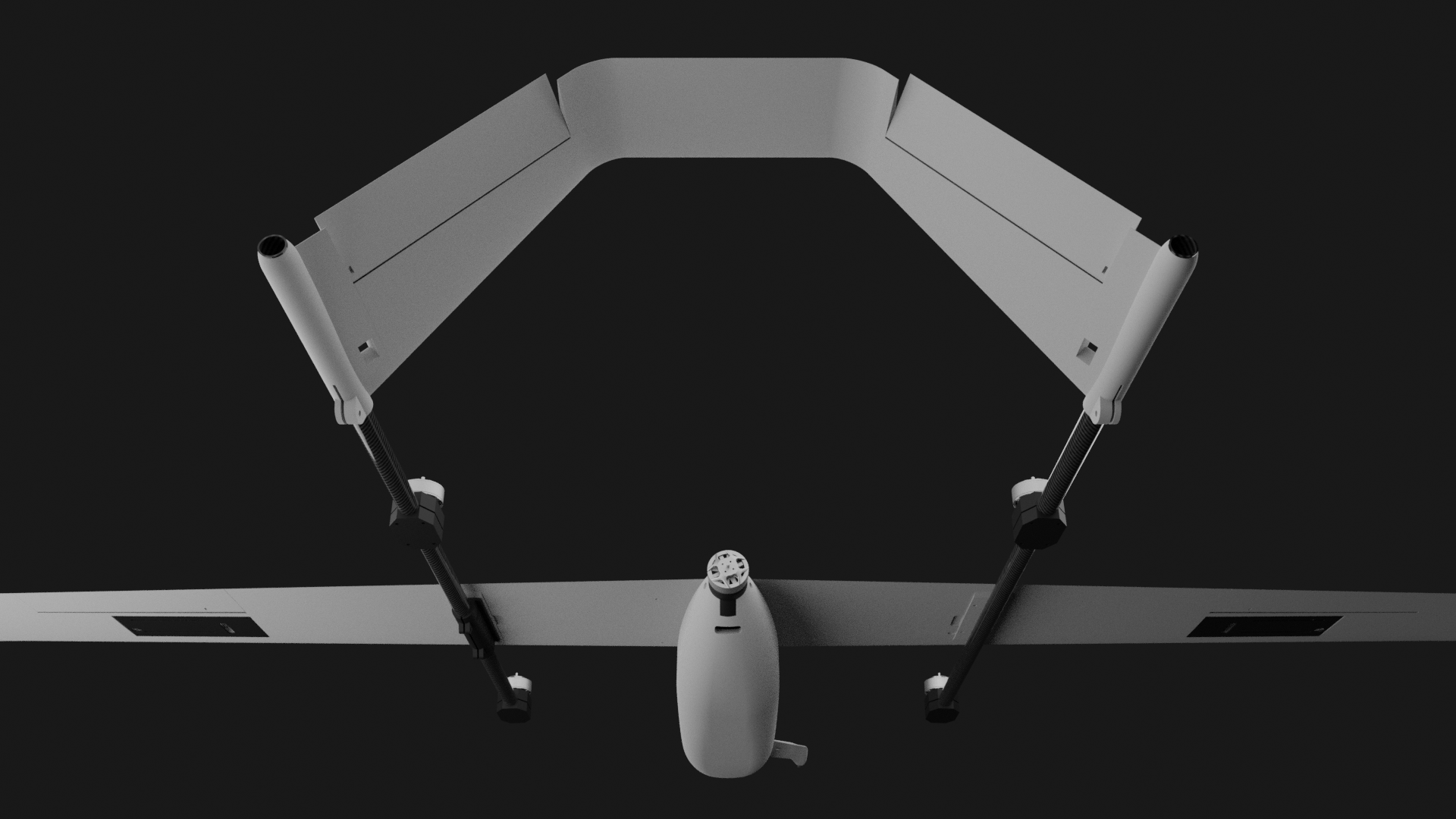
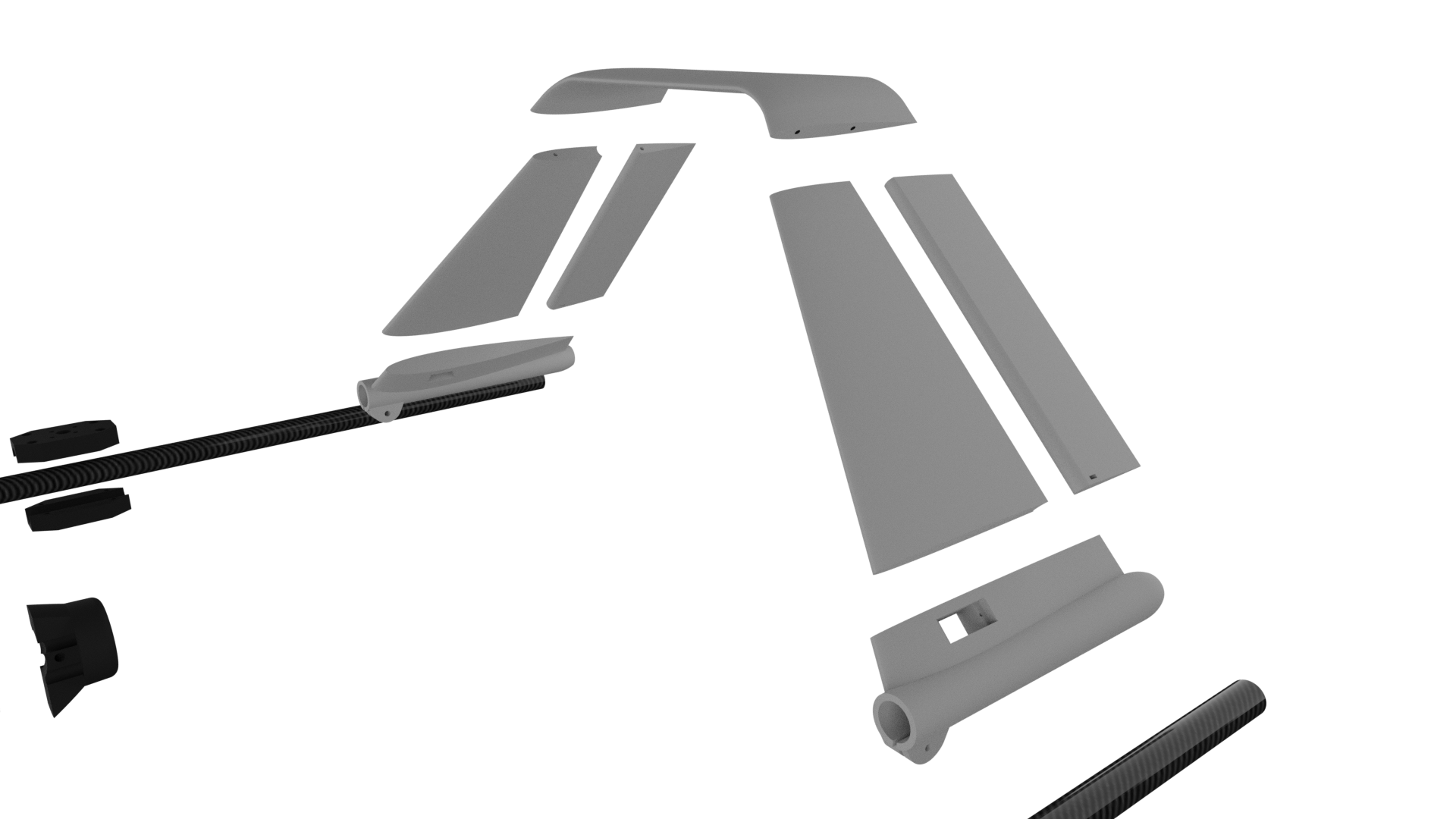
A closer look at Cobra’s A-Tail: A great benefit of the A-Tail is proverse roll when rudder is applied, and no reflex required thanks to the middle section with built in trim assuring neutral pitch stability


























Materials
Print using prefoamed LWPLA (this one) and you will need the following parts:
A bunch of m3 threaded inserts <= 6mm in height
Recommend using Emax es08maii servos for wire clearance
6x3mm magnets for the canopy
Medium CA glue
Polycarbonate or other high-temp filament for the motor mount
220x220x250 minimum size print bed (Ender 3)
Spars:
(1) 10 OD x 8 ID x 1000mm (front main wing spar)
(1) 8 OD x 6 ID x 1000mm (rear main wing spar)
(2) 10 OD x 8 ID x 800mm (wing support spar - fully inside each wing during assembly)
(2) 4x400mm solid tube (aileron hinge)
(2) 4x400mm solid tube (optional fuselage floor support)
(2) 18 OD x 16 ID x1000mm (booms)
(2) 3x240mm solid tube (a tail sides + taileron hinge)
(2) 3x150mm solid tube (a tail top)
Recommended electronics:
Recommended VTOL motor & prop: 3510 700kv | 12x6 CW/CCW
Recommended pusher motor & prop: 4108 620kv | 13x8 CCW
TBS crossfire / ELRS / Dragonlink.
5.8ghz / 1.2ghz video (19x19 camera)
Matek F405-WTE flight controller or similar
Matek M8Q-5883 GPS/Compass or similar
Tmotor F55A 4-in-1 ESC for lift motors
35a BLHeli ESCs for pusher motor
(4) Emax ES08MAII servos. 2 for ailerons, 2 for tailerons.
Example battery for beginners: 10000mah LiPo
Example battery for max endurance: 25200mah Molicel P45A 4S6P
Advanced setup: 2000mah 4S LiPo for lift motors, 4S6P 18650 21000mah LiIon for pusher
Tips & Tricks
Print settings for most parts:
Single wall unless otherwise mentioned in the file name
4 top/bottom layers
0.3mm layer height
3% cubic subdivision infill unless otherwise mentioned in the file name
(DO NOT GO HIGHER THAN 4%) It is absolutely paramount that this recommendation is followed to keep AUW and wingloading down as far as possible
Avoid warping by using a glass bed + glue stick or PEI sheet
NO supports needed!
Set horizontal hole expansion setting correctly (try 0.25) for spar fitment
Print the motor mount in Polycarbonate or PETG with 2 walls and 15% infill
PAY CLOSE ATTENTION TO STL FILES LABELED WITH (double wall + 5% gyroid infill) as these are CRITICAL to structural rigidity
Other recommendations:
Use Ardupilot as iNAV does not support VTOLs
Feel free to setup the ailerons as flaperons on the wings if you prefer
Autotune or bump forward flight PIDs significantly for snappy performance
Aim for an AUW between 3-4kg
Aim for CG as close to the wing marking as possible
Perform takeoff and landing in QHover or QLoiter for gentle climb/descent rate
Reinforcement:
Apply rubberized tape / duct tape to the bottom of the fuselage for protection against harsh landings
Use a rubberized strap (in the slots in the fuselage) + velcro for securing the battery
Additional Info
Wingspan: 2021mm
Wing area: 3684cm^2
Maximum take-off Weight: 6kg
Efficiency: 2.1Wh/km
Cruise speed: 45-65kph
Maximum pusher prop diameter: 13 inches
Maximum VTOL prop diameter: 13 inches
Ardupilot setup
Please read in detail the documentation for setting up quadplanes on Ardupilot: https://ardupilot.org/plane/docs/quadplane-building.html
Cobra is a traditional 4+1 quadplane, with 4 lift motors and 1 pusher motor. Therefore, the frame type is QUAD_X and motor outputs should be set up accordingly. See frame setup for detailed information: https://ardupilot.org/plane/docs/quadplane-frame-setup.html. For increased yaw authority during hover, we recommend canting the motors 2-3 degrees by rotating them on the boom during mounting (see image above). Use of the airspeed sensor is highly recommended, but not required. Cobra includes a fuse1 piece without the airspeed sensor mount built in. For simplest wiring, using a 4in1 ESC for the lift motors is highly recommended.
To set up the A-tail, simply set outputs as VtailLeft and VTailRight to the tail servos, and set the Reversed parameter until proper elevator + rudder functionality is achieved. Double check stabilization in FBWA before flying.
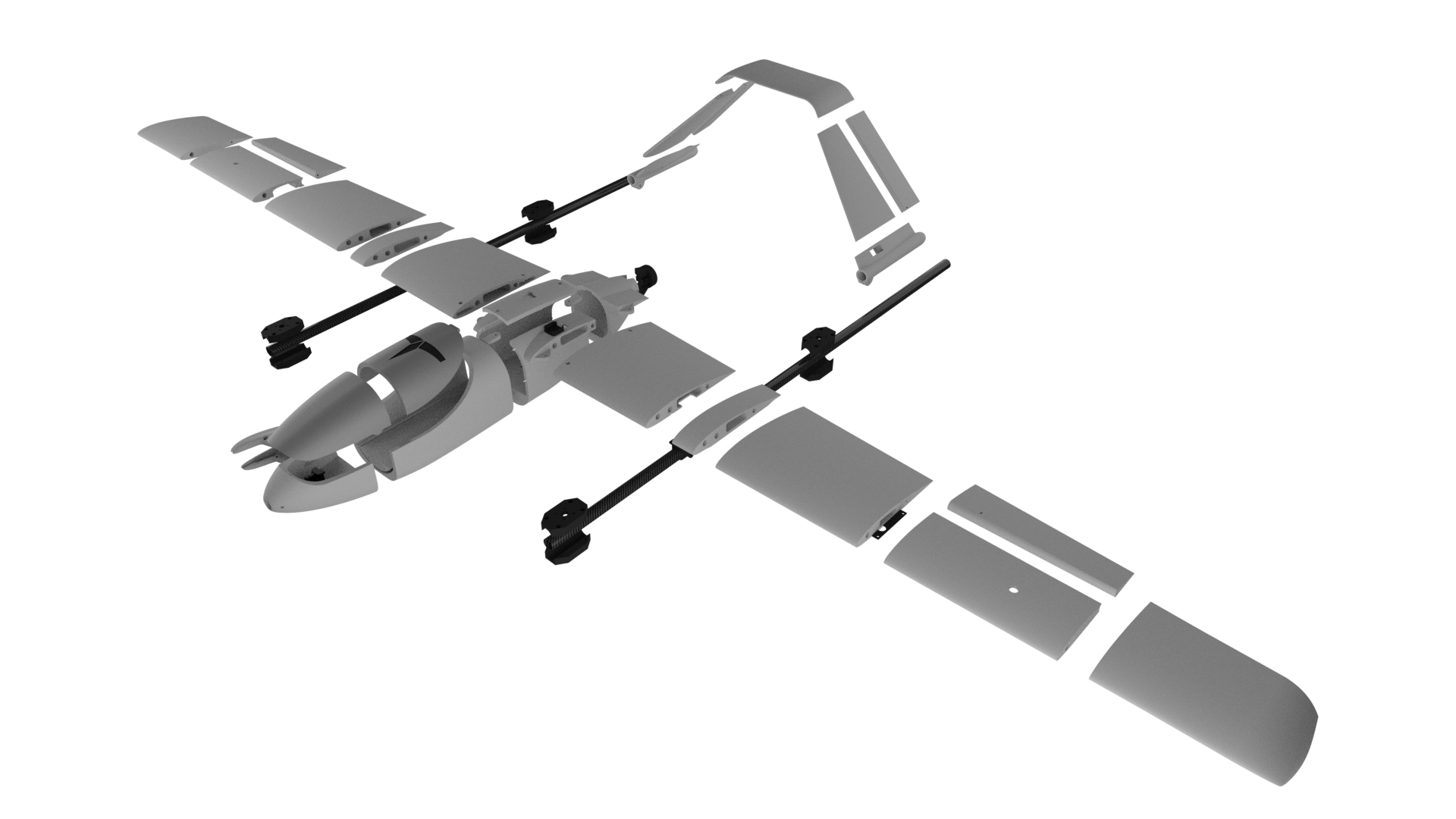
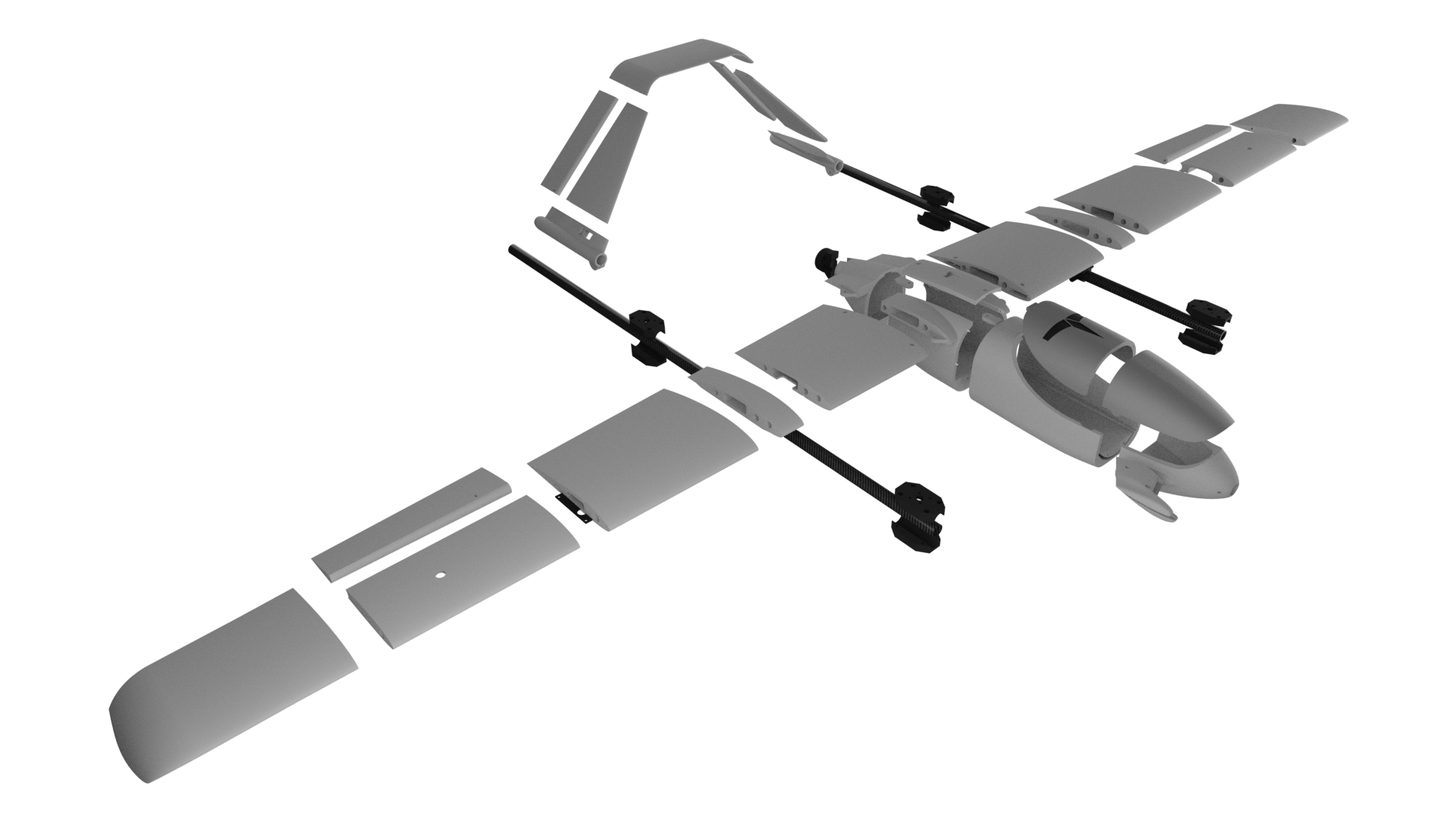
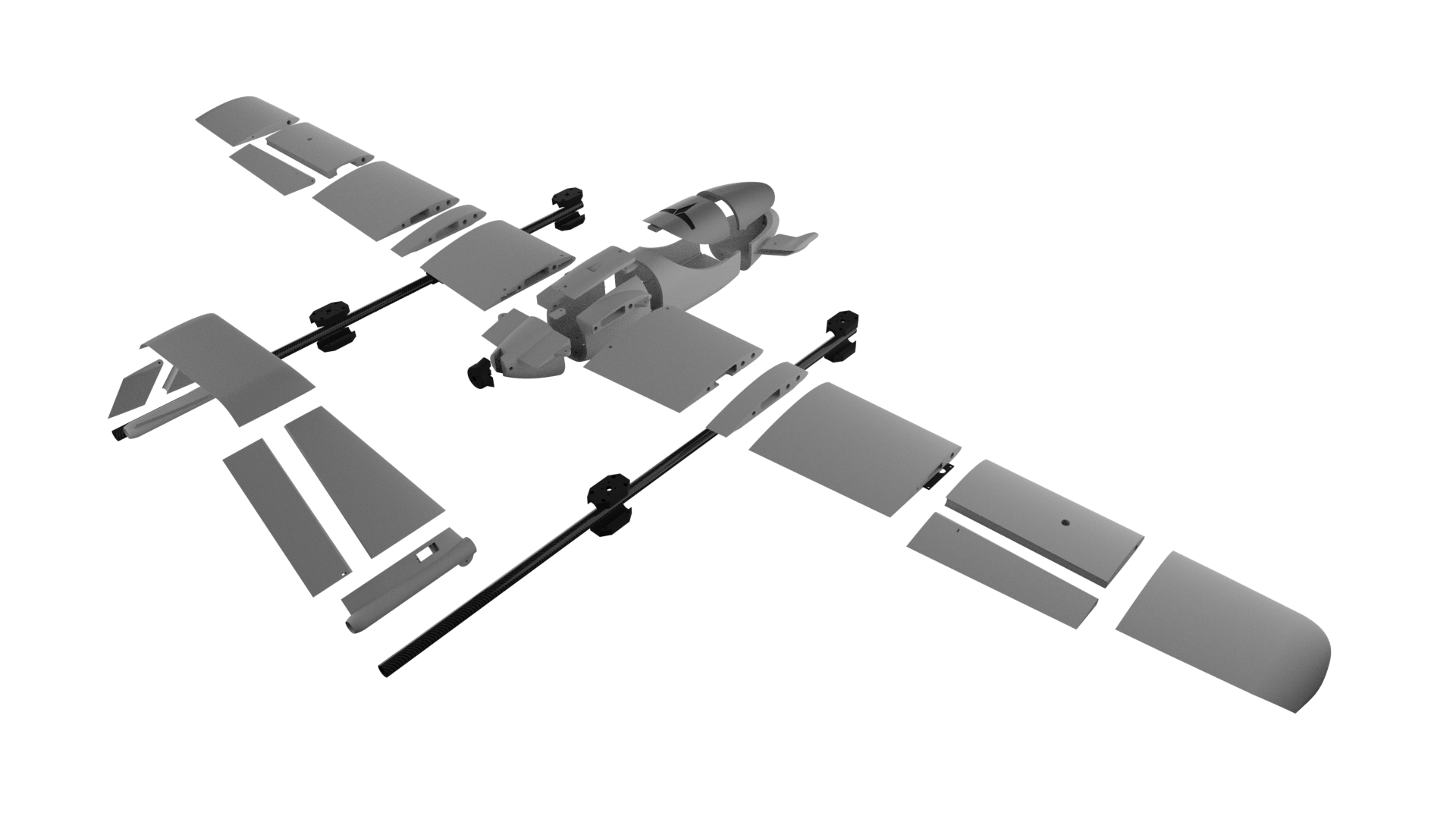
Exploded view
Licensed under the Creative Commons - Attribution - Non-Commercial license.