






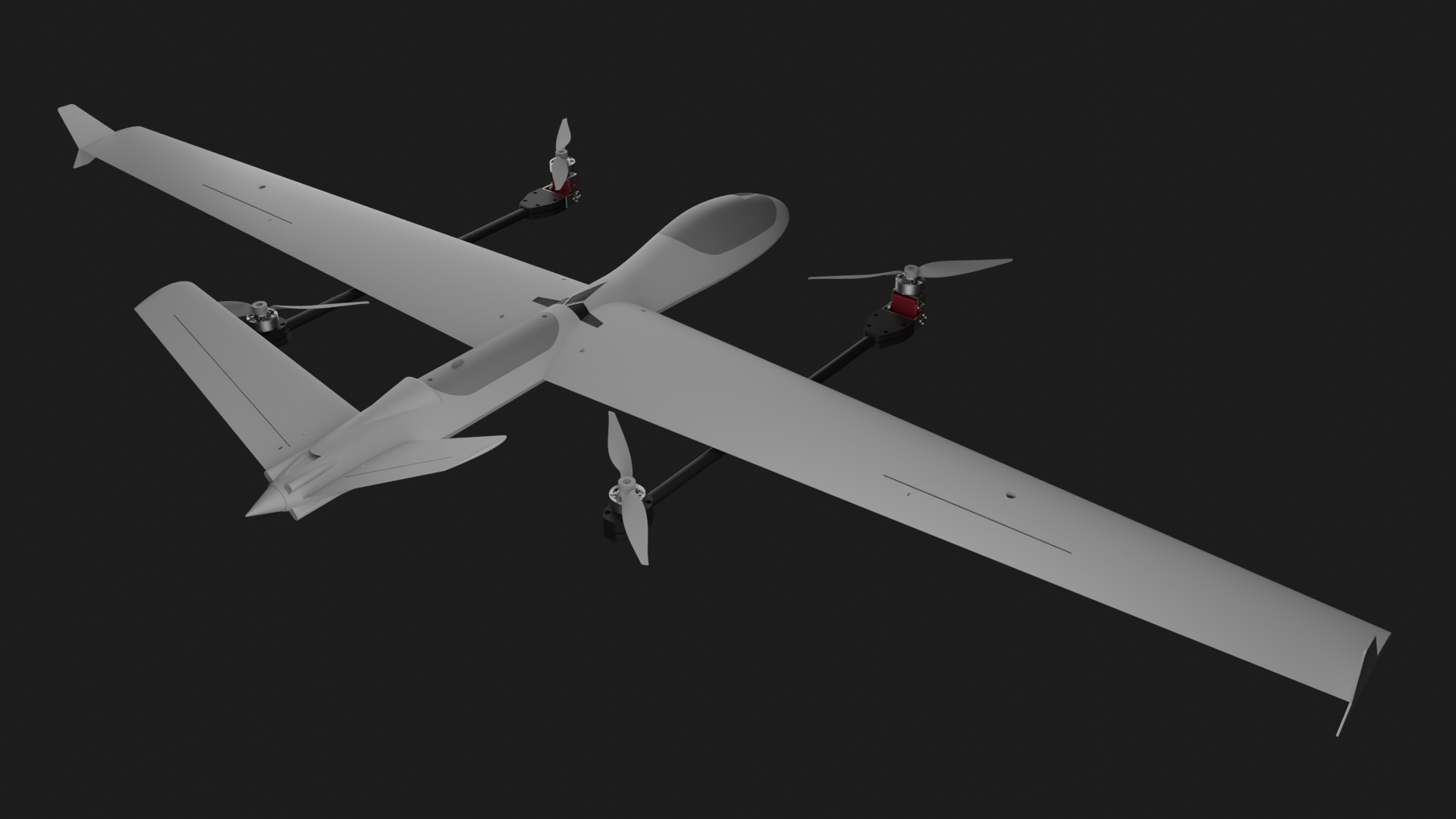
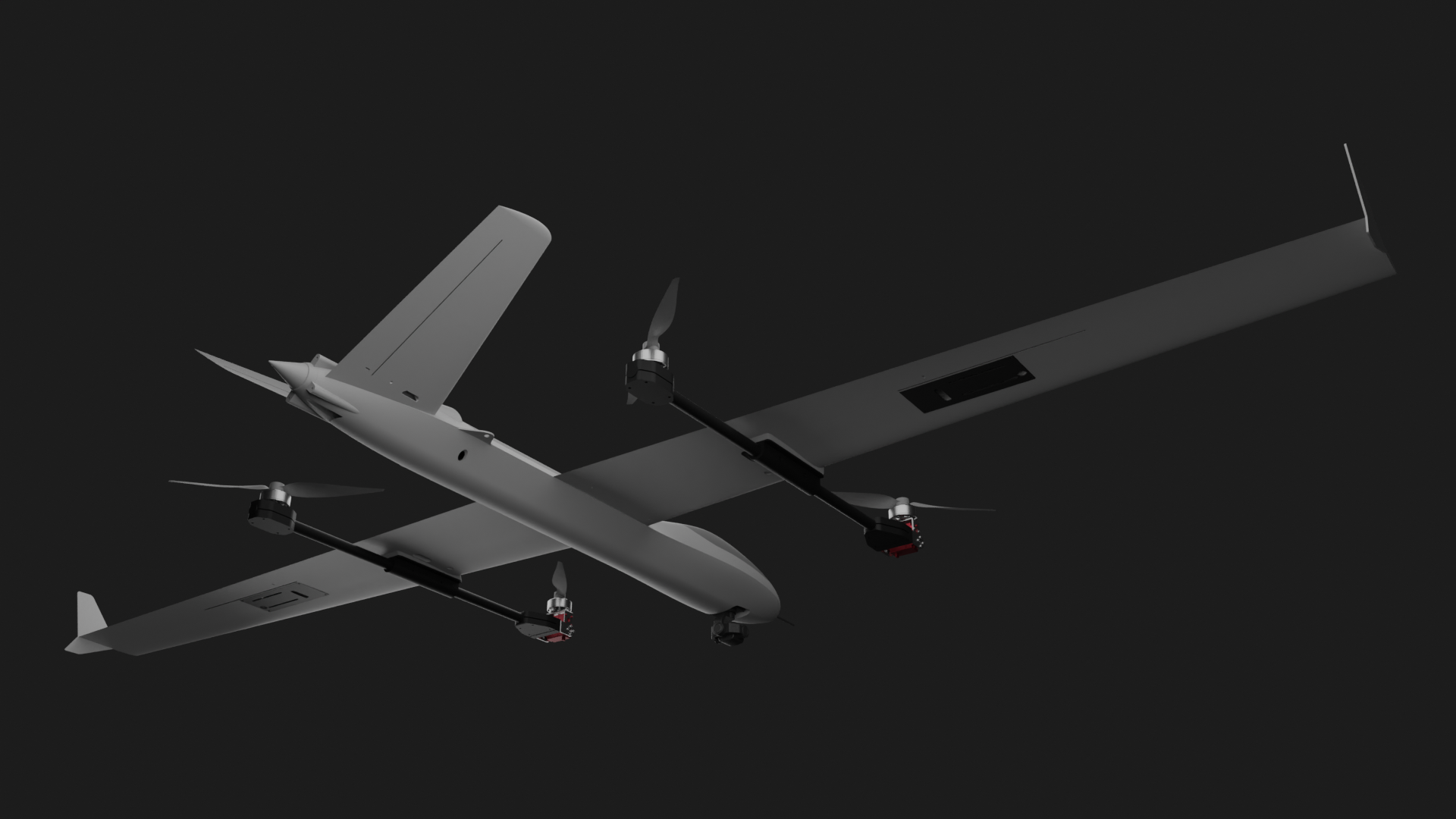
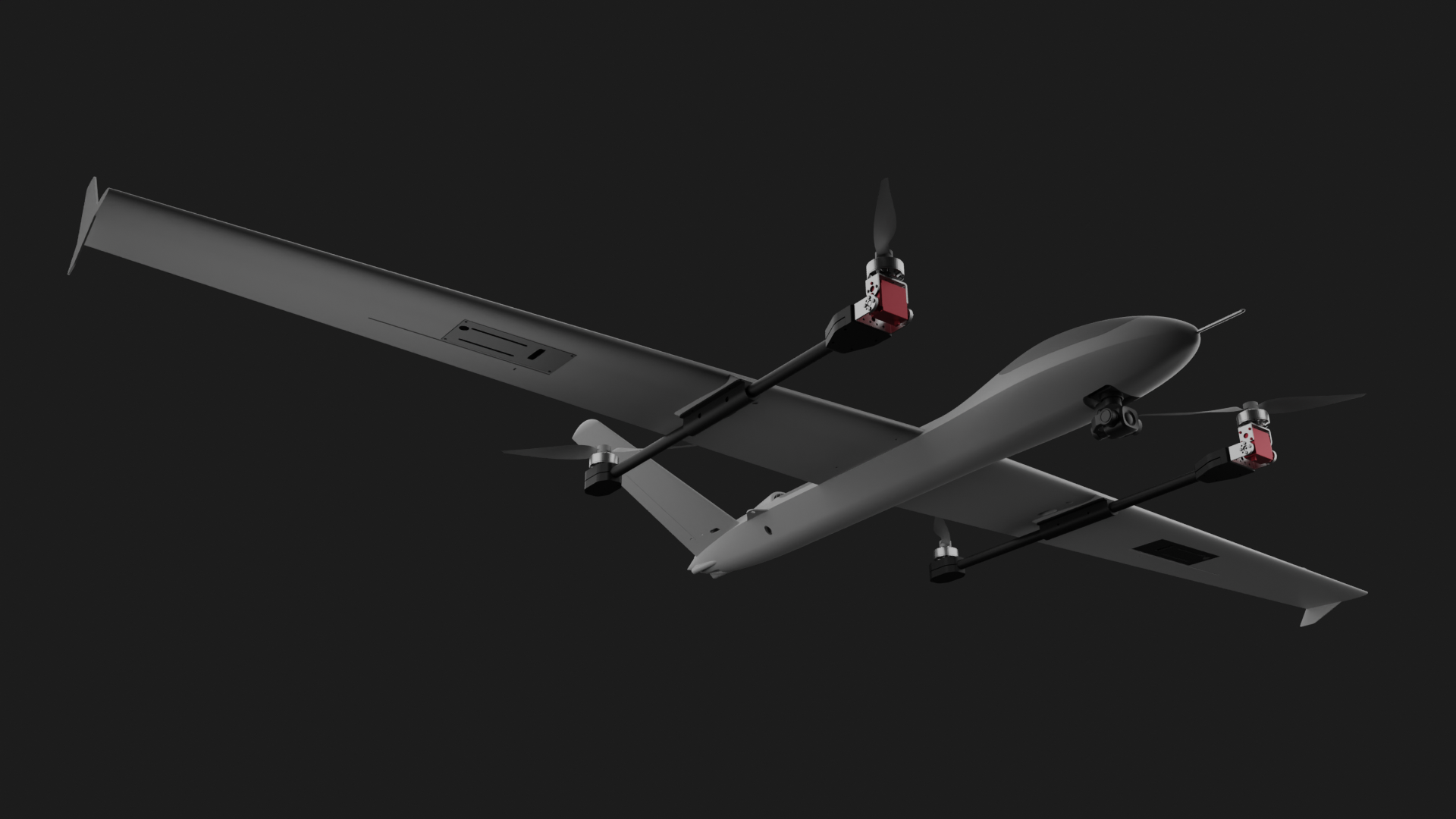
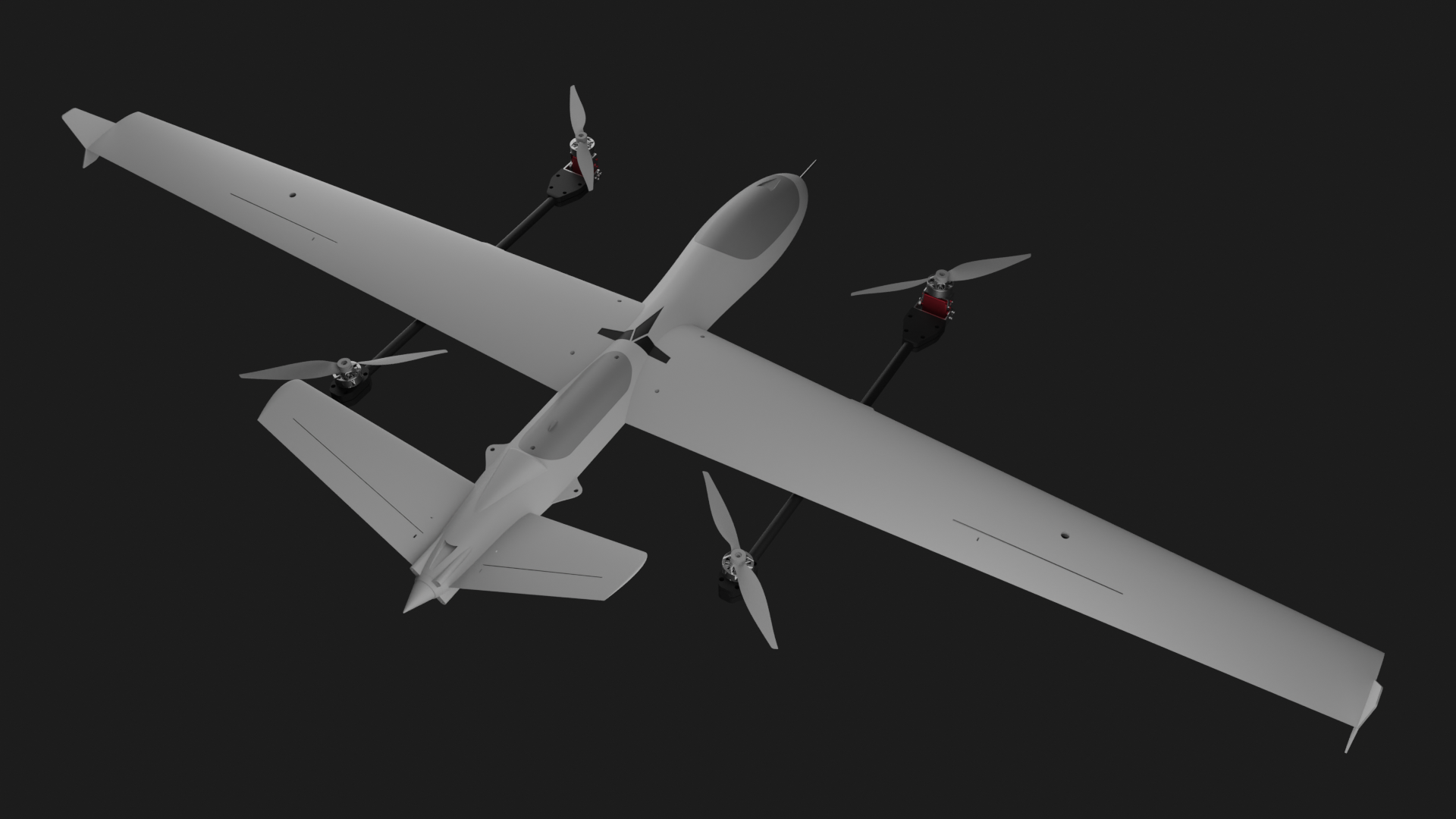
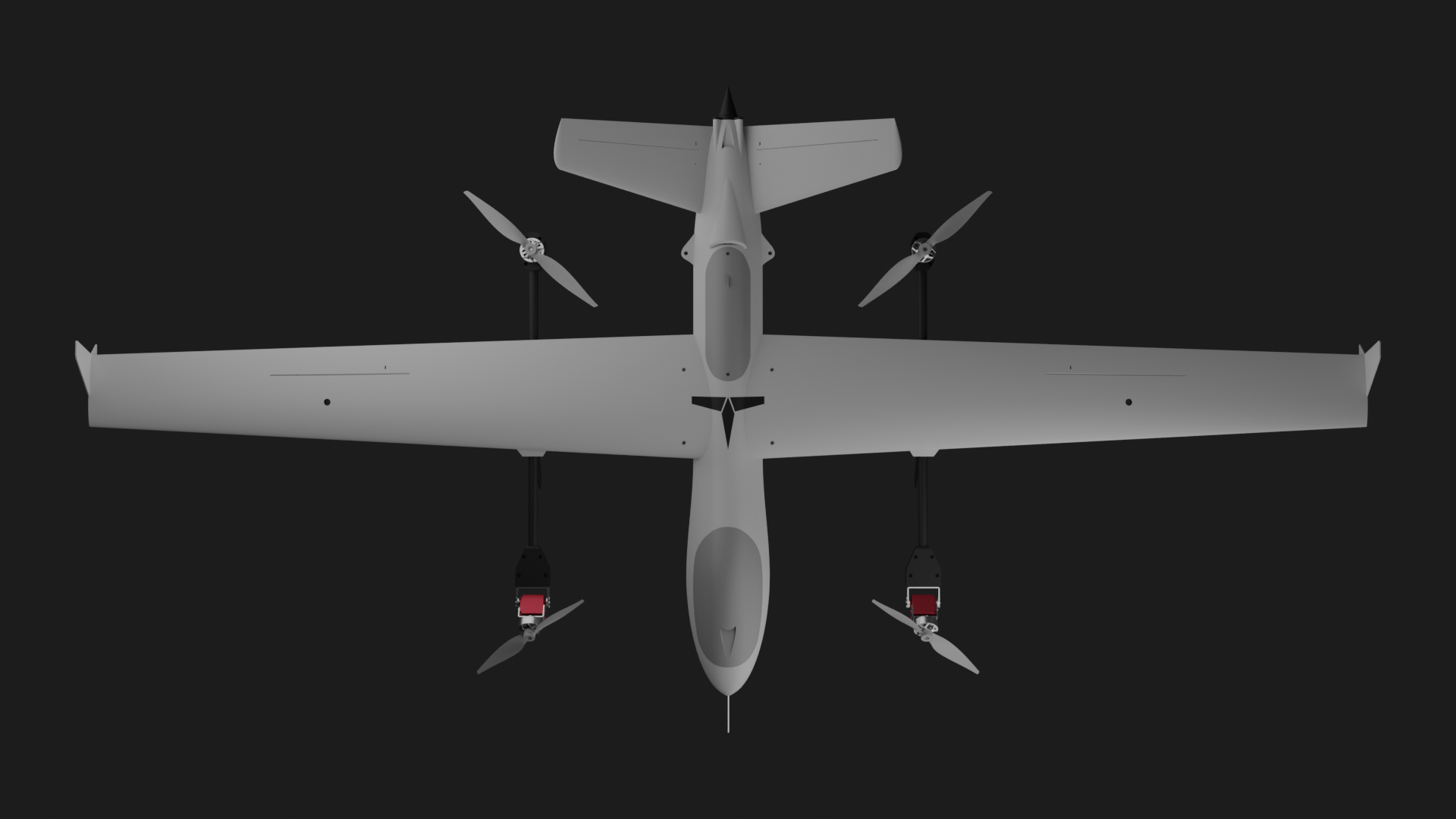
Base model Avenger with minimal prints needed for VTOL conversion - shown without optional landing legs
Analog FPV nose with pitot tube mounting options


Optional fuse4 piece for mounting antennas on the fuselage, such as those on the SIYI HM30
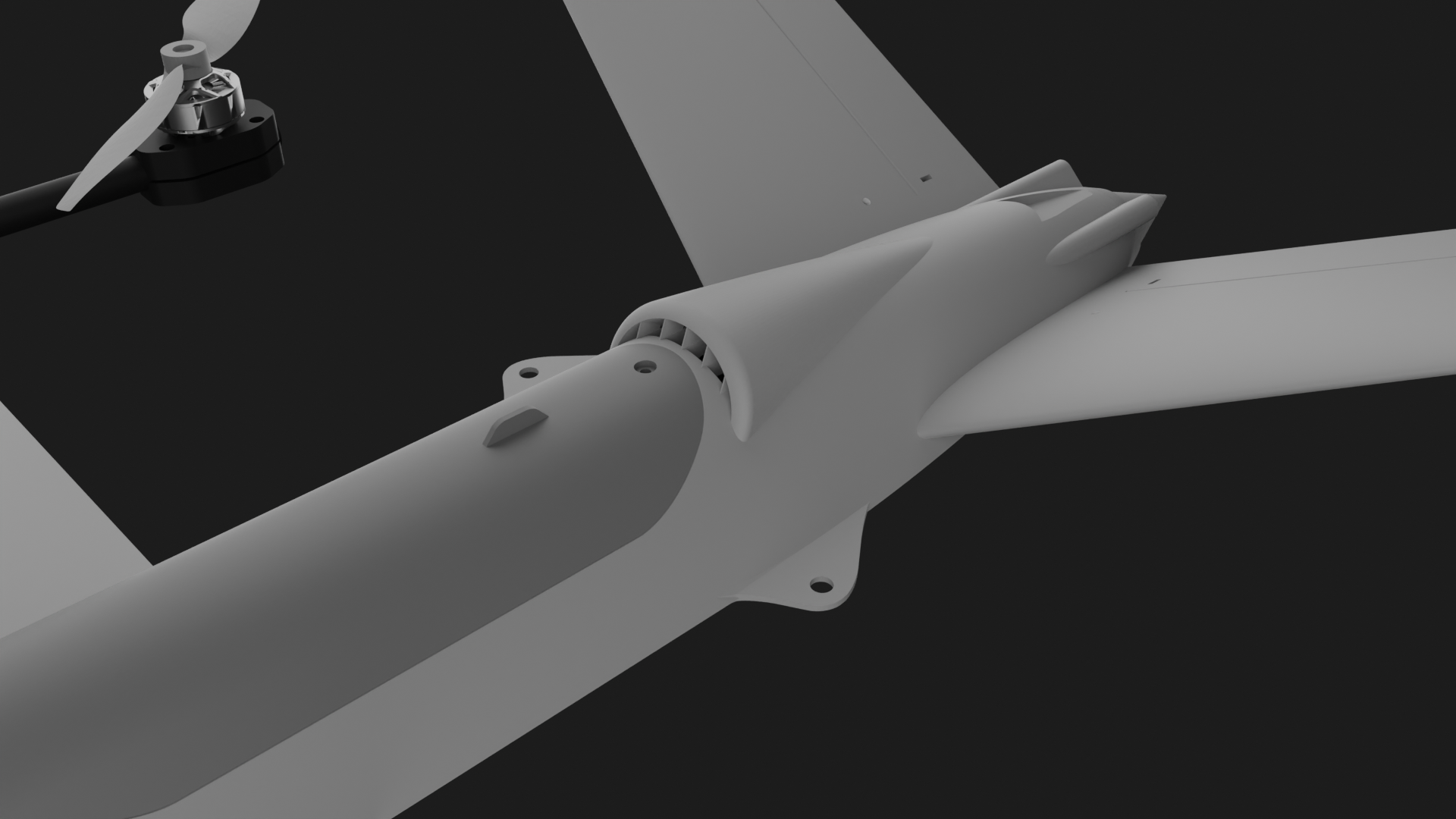
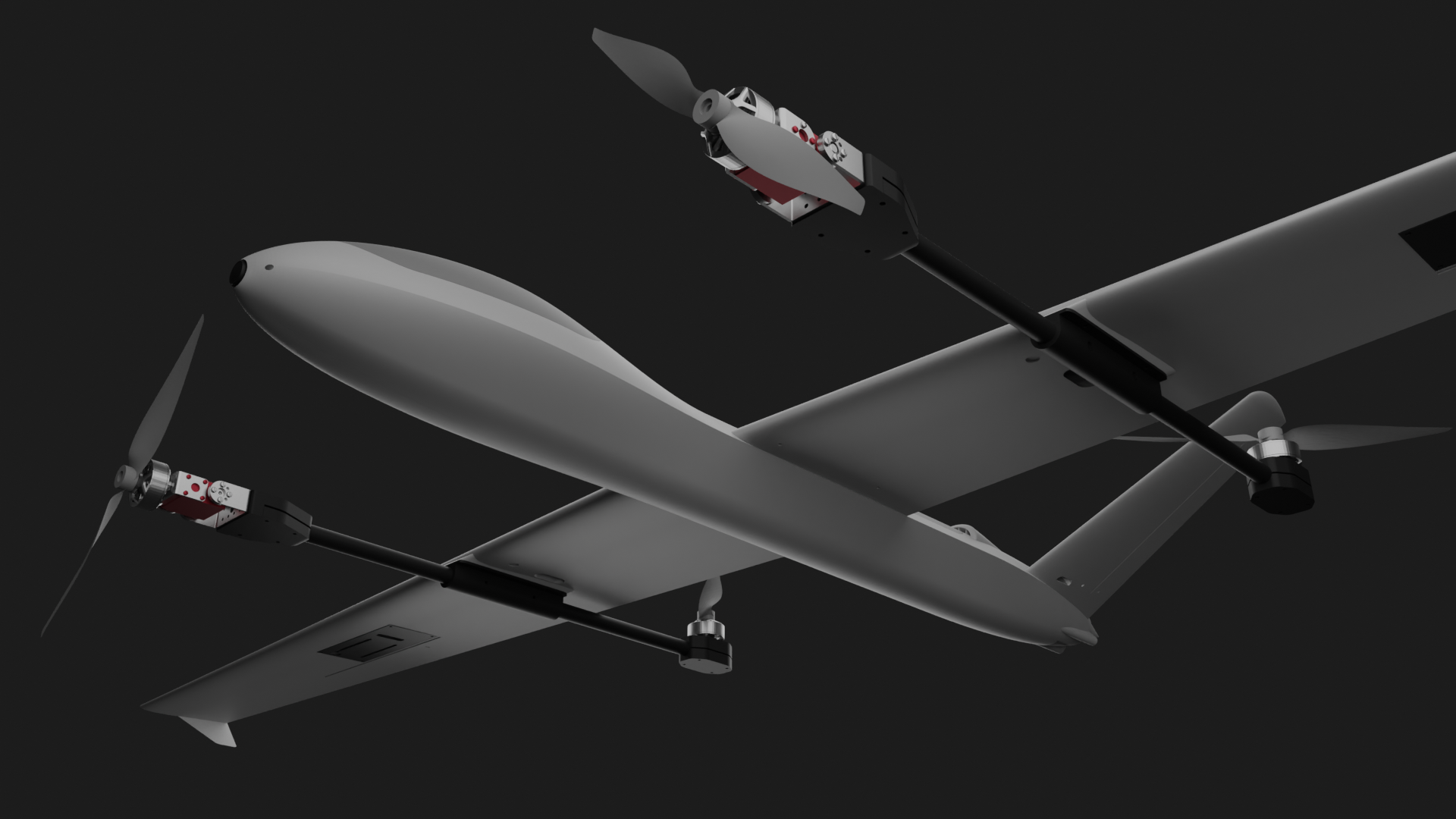
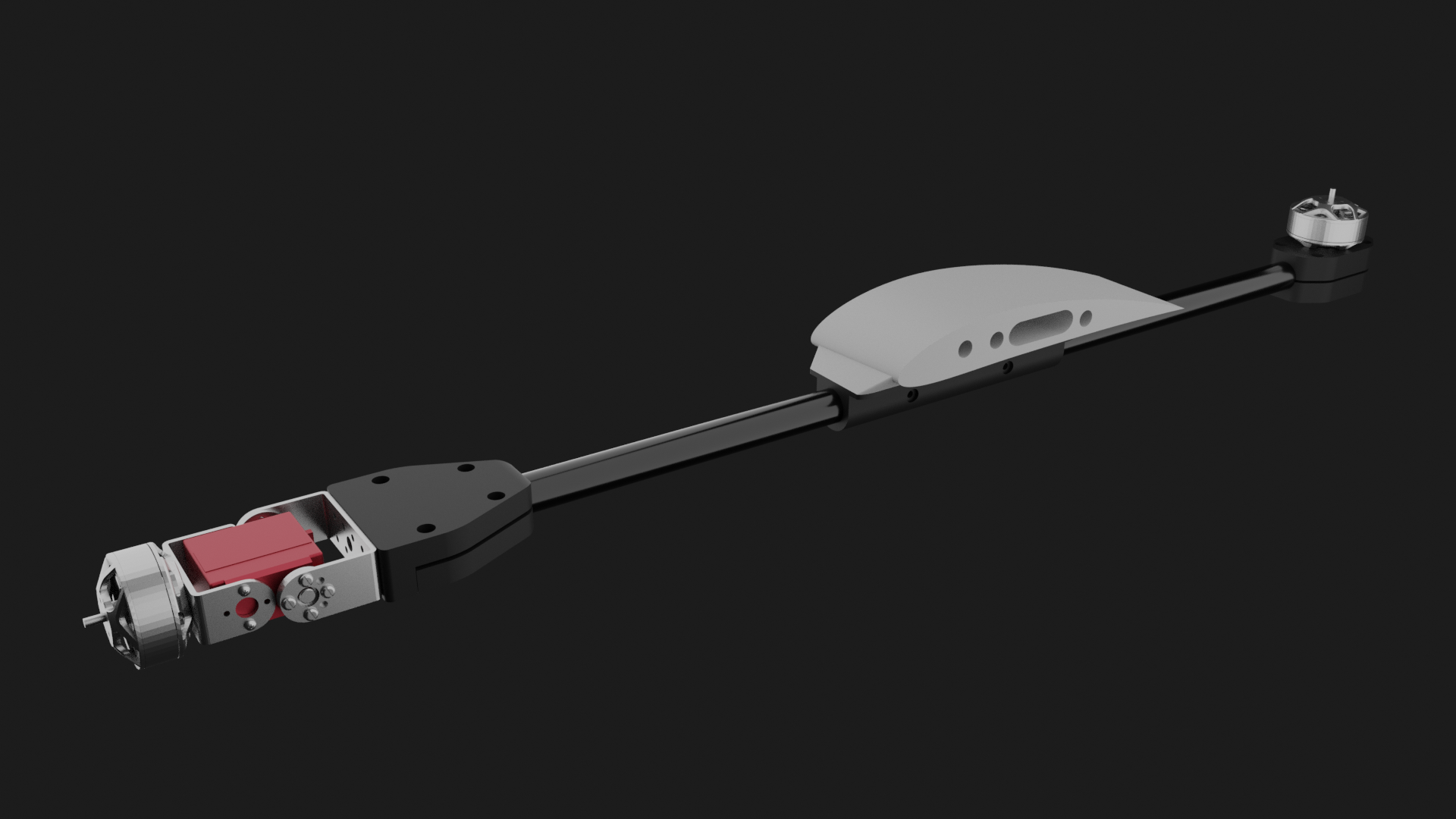
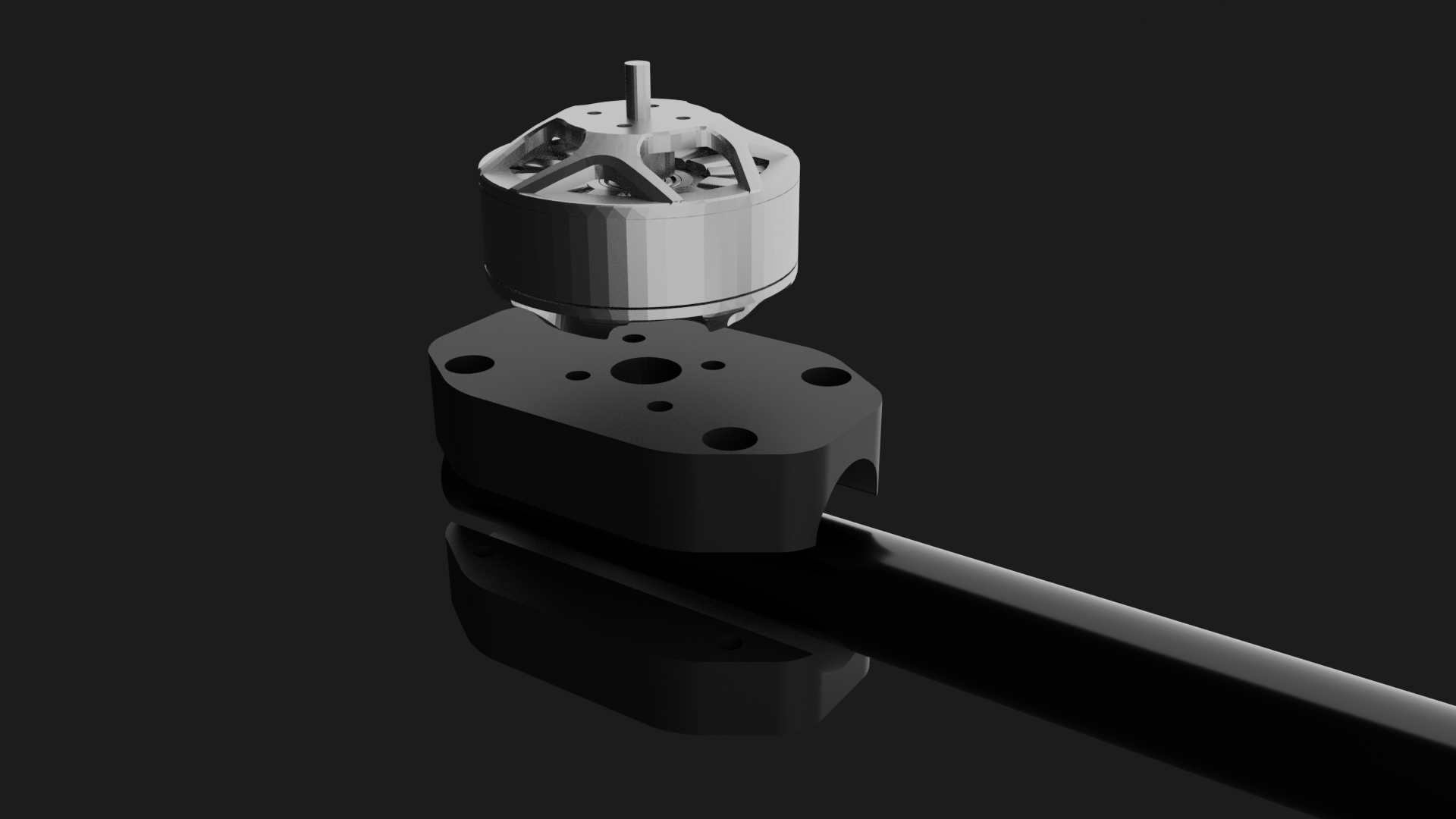
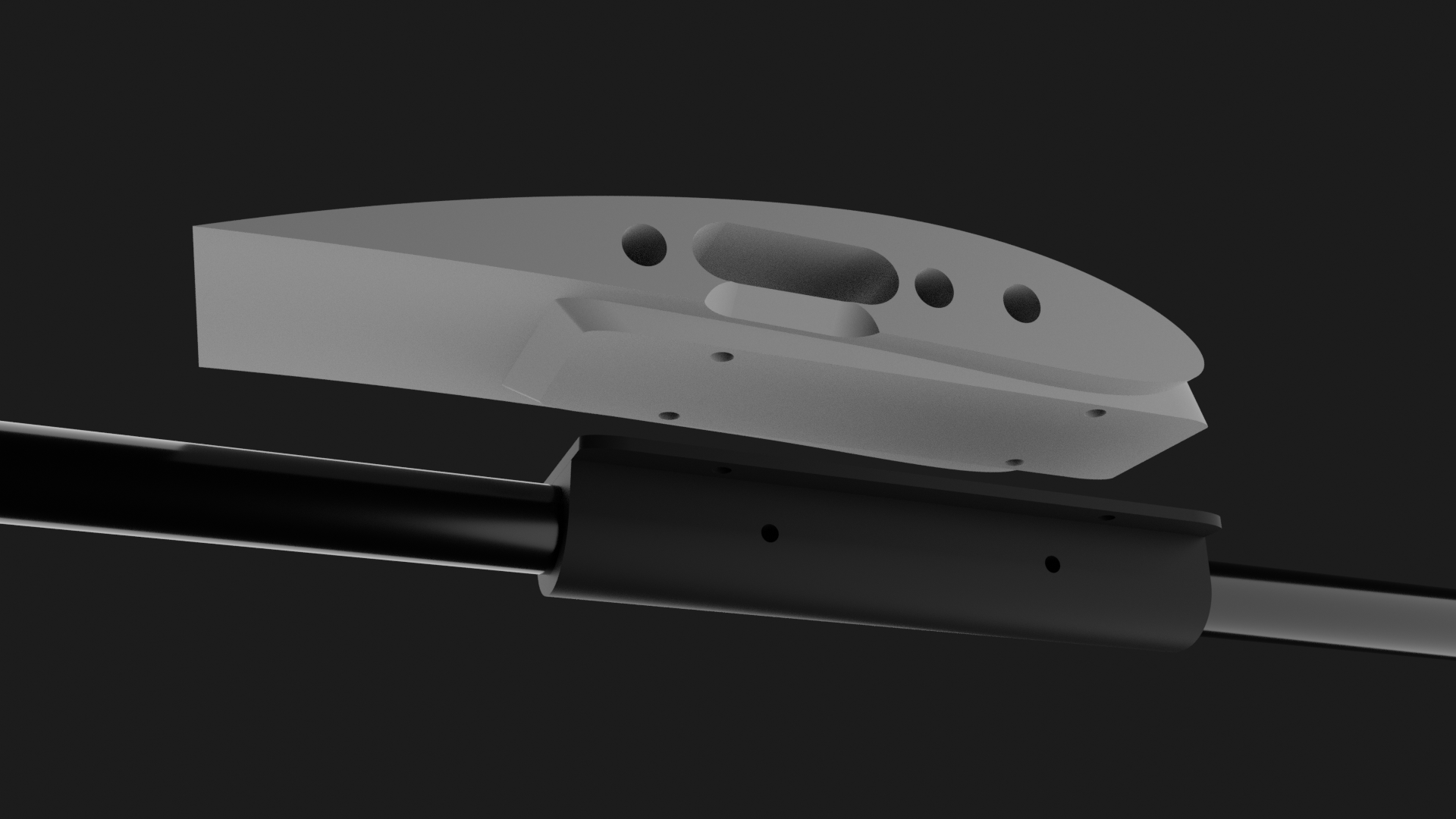
Boom assembly and mounting:
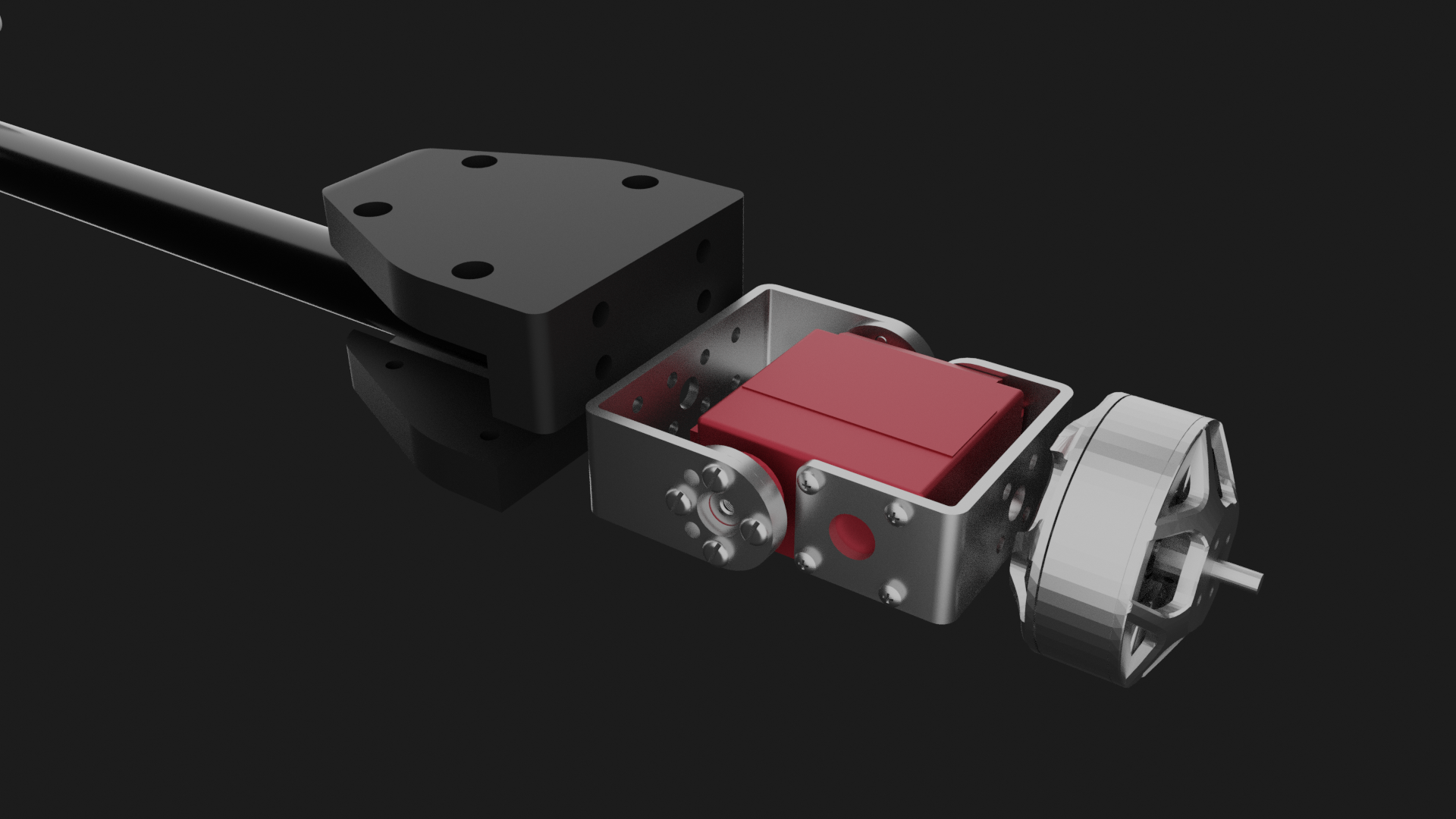
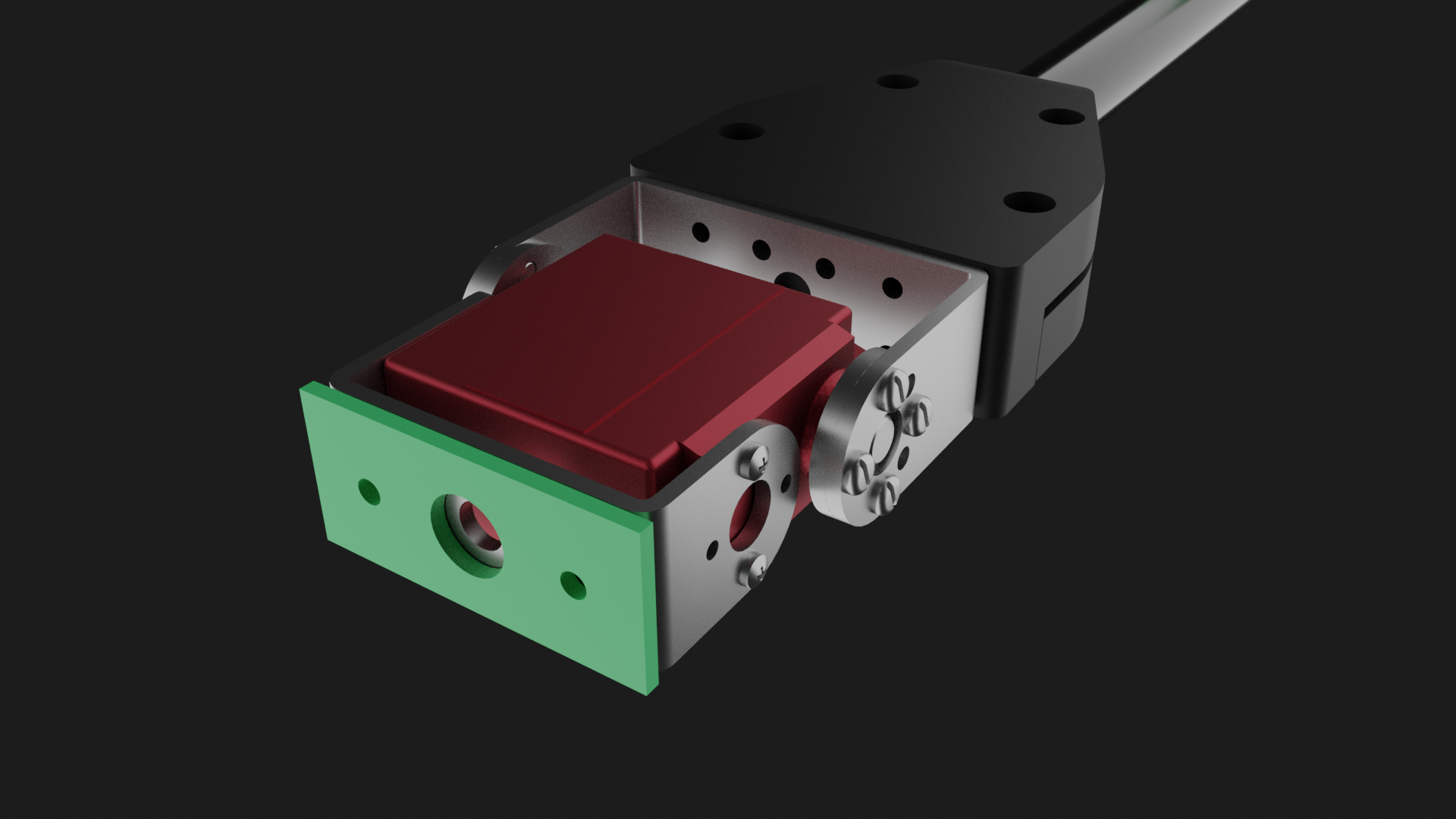
The front tilt servo must be drilled to mount the motor using the included jig (seen below in green).
The two piece motor mounts are designed to be clamped using M3 bolts as well as locknuts.
The booms should stick out ~212.5mm forward of the wing mounting piece
Print wing2 double wall with 5% infill for best strength
Tilt Servo:
20kg Dual output servo with metal brackets.
There are many variants of this, use best judgement if the exact one linked below is not available in your area.
Examples: Amazon, AliExpress

Additional spars needed:
16 OD 14 ID x 600mm (main VTOL booms, preferably mandrel wound)
4x120mm solid (front landing legs - if using them)
2x100mm solid (rear landing leg - if using it)

Ardupilot setup tips:
Official Ardupilot documentation (also see tiltrotor docs) is a great source and has all the information you will need. Below are some parameters you’ll need to set which are specific to 2+2 Tiltrotor VTOLs.
Q_ENABLE = 1
Q_TILT_ENABLE = 1
Q_FRAME_CLASS = 1
Q_TILT_MASK = 4
Q_TILT_TYPE = 2
Q_TILT_YAW_ANGLE = 10


Recommended Motor and Prop
Motor: BrotherHobby 2816
Prop: 12x6 CW / CCW
This is only a suggestion. Feel free to use any other motor and prop combo that you find suitable for your AUW. Remember to choose motors that can provide close to twice the thrust required for hover for best results, especially during backtransition when the battery is at its weakest point and may not be able to deliver the same wattage as on takeoff!















Licensed under the Creative Commons - Attribution - Non-Commercial license. No distribution or commercial use without permission.